November 2008
-
antisocial cat_ servo prototype
Prototype 005Materials: PIC16F88, breadboard, servo, pot Notes:– The servo could keep turning left and right, but…
-
How May I Help You?: Code
The code is very simple. Take a look by clicking the following link.
-

11 LED ON!
http://vimeo.com/moogaloop.swf?clip_id=2380037&server=vimeo.com&show_title=1&show_byline=1&show_portrait=0&color=&fullscreen=1 Led on and off depending on water height from Hsiang Ju Hung on Vimeo. I…
-
Just in case this is useful…
I’m using a billion sensors in my project and realized a small problem: the Arduino only…
-
Bchito : Week 02
http://vimeo.com/moogaloop.swf?clip_id=2349245&server=vimeo.com&show_title=1&show_byline=1&show_portrait=0&color=ff0179&fullscreen=1RFID Reader Test 01 from Jennifer Dopazo on Vimeo.
-
-
Updated User Scenario
Below is a more detailed user scenario for PING – the smart trash bin. It shows…
-
vMind, RFID and everything else in the world…
Violet (the people who make the Nabaztag bunny) Has just released Mir:ror, an RFID console of…
-
Timeline
11/21 – Timer circuit with arduino, get PV cells, communicate readings back to computer via bluetooth?11/28…
-
Sunny
Sunny is a buddy you can carry around who breathes sunlight, he needs his dose of…
-
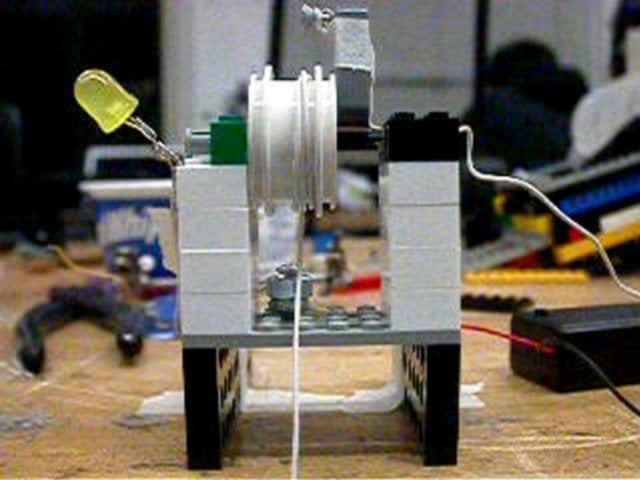
10 Test 2 and Mechanical test 1
I tried bath duck again but failed again 🙁It doesn’t work to make leds on and…
-

zipper test
Here’s my first zipper test on a breadboard before its sewn into the pants. http://vimeo.com/moogaloop.swf?clip_id=2279427&server=vimeo.com&show_title=1&show_byline=1&show_portrait=0&color=&fullscreen=1zipper test…
-
09 Timeline
11/18 Order parts. Find a right range of height of bath water. Find a right range…
-
antisocial toy project schedule
11/11 look for what kind of sensors and motors I can use in my project11/12 order…
-
Schedule for Final Project
Week of 11/11: Draw out design of trash bin, plan how the technology will work, order…
-
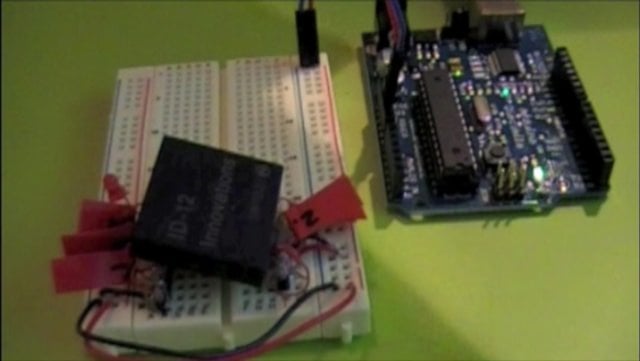
‘Bchito’ for your purse [Project Schedule]
Bill of Materials (B.O.M.) RFID Reader ID -12 (Sparkfun sku:SEN-08419) RFID Reader Breakout (Sparkfun sku: SEN-08423)…
You must be logged in to post a comment.