March 7, 2013
-
Free Writing
1. What did you find surprising difficult in the this Embedded Arduino Paper Automata project? First,…
-
Embedded Arduino Paper Automata Journal
1-What did you find surprising difficult in the Embedded Arduino Paper Automata project? The most difficult…
-
Paper Automata with Embedded Arduino Response
Free Writing Doing this Paper Automata was a challenge for me, especially when it came to…
-
Embedded Arduino Paper Automata Projecty Journal
When working with this project I had a few issues that I stumbled over. At first,…
-
Embedded Arduino Paper Automata Response
What I found surprisingly difficult about this assignment was, surprisingly, making the paper automata itself. I…
-
March 07: Embedded Arduino Automata Free Writing
What did you find suprisingly difficult in this embedded Arduino paper automata project? The most difficult…
-

Free Writing
What I found surprising about the Embedded Arduino Paper Automata project is how these paper mechanism…
-
Embeded Arduino Paper Automata – Free Writing
Athlete – example 14 The major difficulty for this particular project was the enclosing the Arduino…
-
Embedded Arduino Paper automate project
1)i was using stepper motor for continuos motion so it is my first time to us…
-
Embedded Arduino Automaton Free Writing (3/7)
What did you find surprisingly difficult in this embedded arduino automaton project? -For me it was…
-
Embedded Arduino Paper Automata Project – Free write
It’s surprisingly difficult to achieve consistency with the paper. Individual pieces would come unglued under pressure…
-
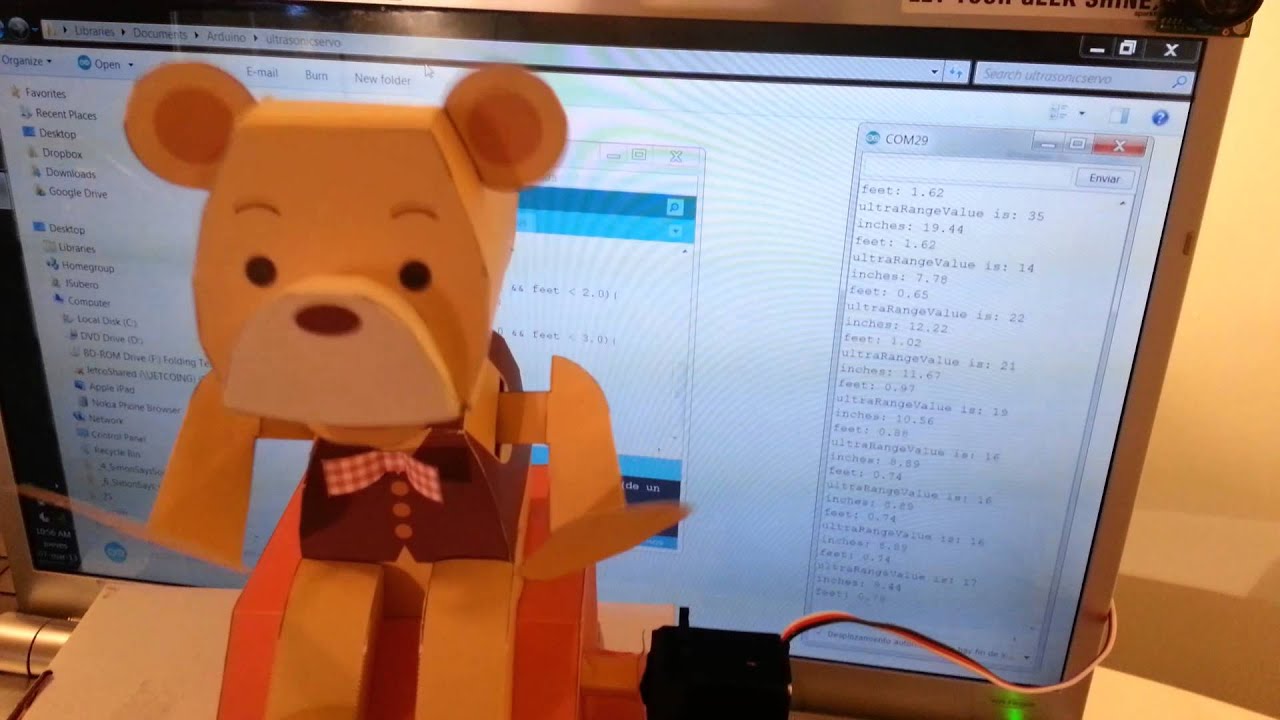
Peak-a-bear
Controlling a servo with an ultrasonic range sensor. Second paper toy.
-
Bio
I grew up on a farm in the Midwest and studied Film and Creative Writing at…
-
Bio
My name is Youmna Aoukar, I come from Beirut, Lebanon. My background is in graphic design…
-

Bionic Penguin
“Take a look at your history, everything you built leads up to me I got…
-

merKangaroo
FLY!!! fly!! mother merKangaroo
-
B B BIO!!
1) I came from Thailand and I have undergraduate degreed in architecture. 2) During my thesis…
-

Paper Automatas: Chickens & Train
http://vimeo.com/60633886 The first assignment we did was from the “Amazing Paper Pets” book. I decided to…
You must be logged in to post a comment.