Final Prototype –
Teruteru Bōzu – Sunshine Monk –


Wireless Toys for Cats –
You’ve Got Mail! –

Lion – “You’ve got an order!”
Teruteru Bōzu – Sunshine Monk –
Wireless Toys for Cats –
You’ve Got Mail! –
Lion – “You’ve got an order!”
I want to make a series of dirty little robots for the final.
They are constructed of metal scrap found on the city streets, old record covers, and electronic components.
Their role is to sort out human thoughts in a robotish way, bring quirky little joy to the overloaded human minds
of city people. In this kind of manifestation the negative stuff of your overloaded mind is gone.
How it works:
You open the app and type words about what’s in your troubled mind.
As soon as you click “that’s it”, all the little robots move into action as a
composition to interoperate/translate your words…some blink, some
walk, some roll, some make noise, bla bla bla…… What the robots
actually do is XXXXXX. The time they do it depends on the length of
the words you typed.
Why I chose the material that I chose:
1. Worn out stuff has a natural soothing function.
It has solid psychological background.
2. Metal scrap comes from the New York City streets.
If the dirty little robots bring you positive feelings, it’s
like the tension/anxiety/worries of you brought by
New York City can also be cured by New York City.
How romantic.
3. Old record covers has a very long history/memory
of music and the people who loved them.
How romantic.


I have been thinking about a few different things I would like to do for the final assignment, but I have not been able to narrow it down to one just yet.
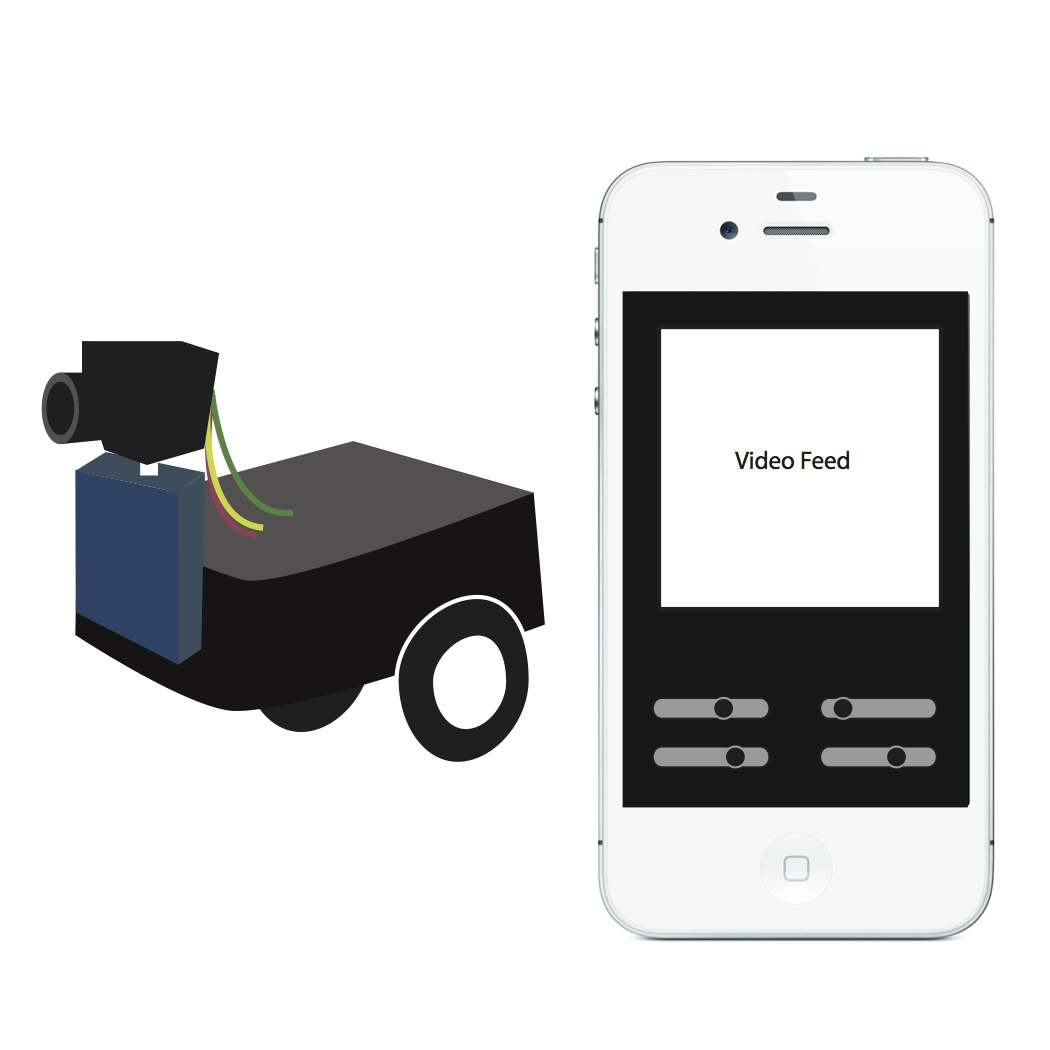
My first idea is to have a remote control car with a camera strapped on it like a drone that I can control using my phone. There will be four servos, one continuous servo for each wheel and two to move the camera up and down and side to side.
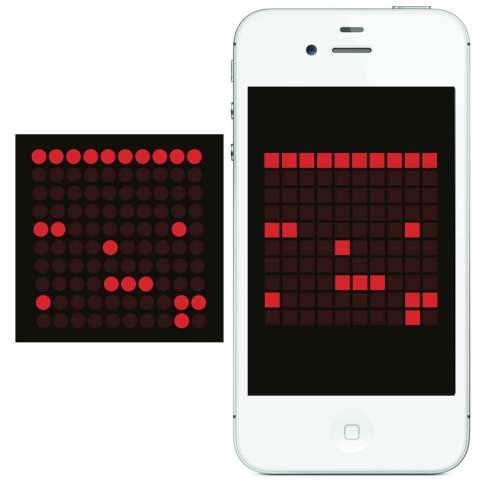
My next idea is to make an LED matrix, possibly 10×10 that is controllable by my iPhone. I would be able to draw the pixels on my screen and see the direct translation onto the matrix.
I have also been considering the possibility of purchasing a toy, like a teddy ruxpin or a furby and taking it apart to make my own toy from it that would be controlled through my phone.

Or maybe make a hexapod like this one I found that has really nice motion when it walks.

and lastly I have been considering making some sort of robot that I can wake up and control its head and eyes and some other features.
I still am not sure which direction I want to go but these are all things that I have been considering so far.
To illustrate a ‘role’ prototype for my thesis (and the project for this class) I’ve been working on a video that shows an intrepid hero using the TOTAbot (Toys of the Apocalypse bot) to scan for motion, scavenge, test for radioactivity, and fend off zombie attacks. I’m still working on the final edit, so here’s a snippet of the beginning.
It’s not stable, because I left the upper side open…
What do we do with the noise of the servos…
The Waiting Hand, a physical representation of the time we spend waiting, and a tool that can be used and carried with us around the home while we run errands, waiting for our files to download before we are signaled to return to use our computers.
After research a few of the blog posts in your website now, and I truly like your manner of blogging. I bookmarked it to my bookmark website checklist and will likely be checking again soon. Pls check out my site as properly and let me know what you think.
Building Cubicles is interactive sculptural piece that takes the shape of a building.
The building has different compartments where different characters live.
The public is invited to open each door to discover the characters personality.
When a user opens the door, the paper automatas start to move in different ways. This movements is triggers by a sensor, in this case an ultra sonic range finder.
The narrative behind the piece is fantastic and funny.
The characters act like spies. They are intended to be funny and to some extent absurd and creepy.
The building and the automatas are made out of cardboard, chipboard and different papers.
We mixed these materials with hand drawn illustrations because we wanted to convey a comic, sketchy look and feel.
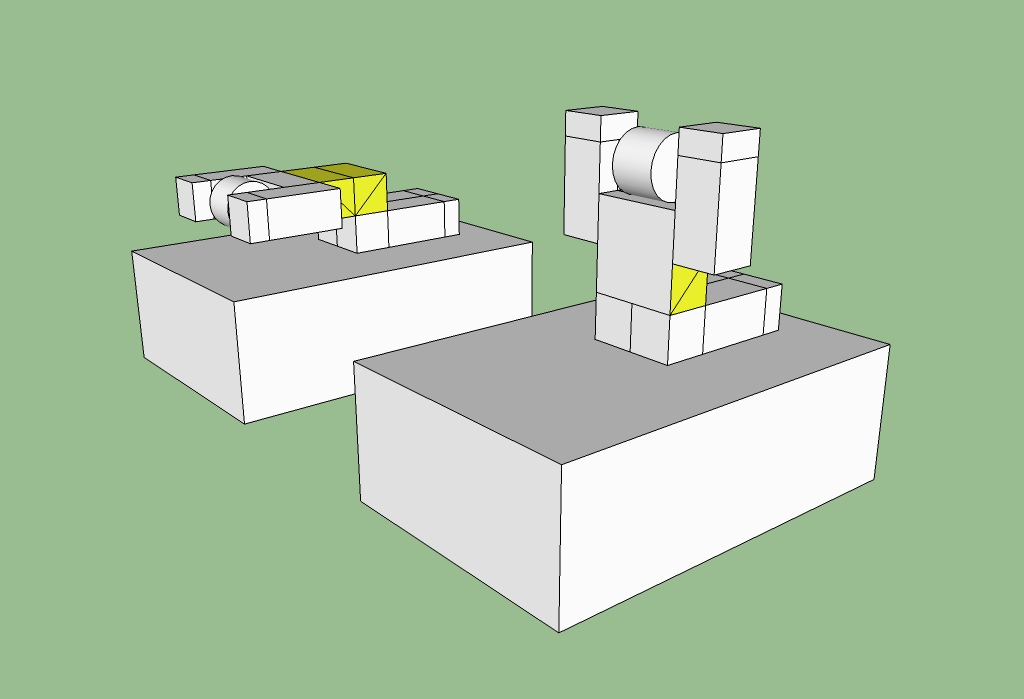
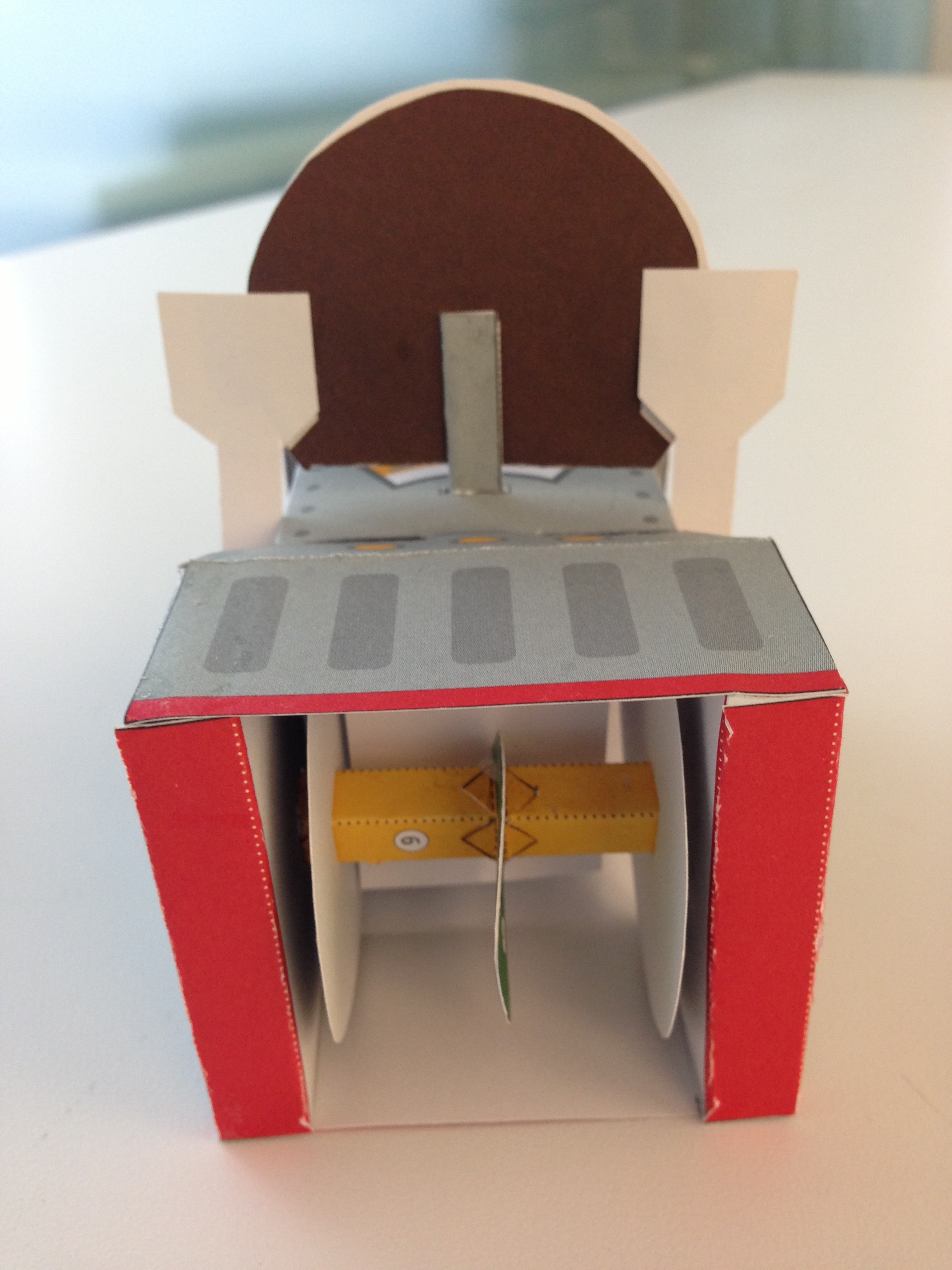
1. One thing that you find surprising about making your project?
I found that it becomes much harder to wrtie a code with multiple variables and certain sequence of what happens early and later, which requires more practice on the logic structure of the codes.
2. One thing you really like about your project?
I like the fact that the box can move and relocate in a given space.
3. One thing that’s unique about your peoject?
The conbination of an obsolete brown paper box and the unexpectation of a small monster living inside of it.
1. One thing you found surprising about making your project.
Before I actually made my paper automata, I spent many hours planning out. First, I deeply thought about concept, emotional response, and user’s action. Then, I studied our textbooks very carefully, and searched for automata I can apply to my project. I made a “Diarrhea Boy” based on Penguin and Peak-a-Bear automata from books. There is cut-out paper food. If the foods are close to the diarrhea boy, he has to “got to go”. I used servo and ultrasonic rangefinder to recognize user’s actions.
2. One thing you really like about your project.
My project was a success that the “Diarrhea Boy” carried humor. While making it at D12, people stopped by and laughed. I had much fun making it.
3. One thing you think is unique or important about your project.
I believe the most important essence of toy is fun, and that is why I love toy. My project is for everyone we all can laugh while play with it because we all understand this critical moment. 🙂
Title of project: Building Cubicles by Youmna and Daniela
1- Daniela and I made a mini toy installation where users can interact with different mini doors from a cardboard building. When the user opens the door, a character would be represented and start to animate. Each character has a personality and tells a different story.
Building the gears for these different characters was pretty hard.
I started off by building one of the gear example from the Karakuri book because I wanted to make a character that has a tongue that wiggles. So I thought that making a gear that could push the tongue would be helpful.
The paper was really thin and it broke very easily.
After doing the first prototype, I decided to explore different materials such as cardboard and chipboard.
Working with these materials was better for me but sometimes the chipboard was too sturdy and it didn’t allow for the movement to happen.
So a mixture of light and heavy paper would have been ideal.
2-I really like the aesthetics of our project. Making the characters was really fun. Using different materials ranging from cardboard to poster boards to strings was very challenging. Thinking about the characters personalities was also very fun. Thinking about what emotion every character would incite in people lives was also in interesting process. I like the fact that our piece is a combination of humor and irony.
3-I think that the most unique thing about our piece is the fact that we created an environment for our characters through the structure of the building. We were inspired by the writer named Chris Ware and especially his piece called Building stories.
I wanted the arm to only wave when it sensed a “wave” back and the code for that was significantly harder than I thought it would be. I needed to first average out the results when the board was turned on to allow for it to work in different environments, then “look” for a wave. That meant that the arm couldn’t move as soon as it sensed the hands shadow, but needed to wait until that hand passed. I also didn’t want the bot to wave back if you just held your hand over its face.
I like that the movement of the arm is smooth, and the way it can distinguish between a wave and someone just interacting with the photocell.
Something that’s unique to this project is the custom gear and lever system built by combining K’NEX and Instamorph. Crafting the gear took a good amount of testing to have enough incline to create a wave-like motion, but still function consistently and smoothly. One advantage of Instamorph was that I was able to mold the actual lever directly to the motor so the entire apparatus is significantly more stable than anything else I’ve done for this class.
The most surprising thing about this ladybug was getting the Theo Jansen Mechanism to work. However I discovered a lot of technical things along the way. The first was working with paper materials. This first prototype I couldn’t get it laser cut, so I had to choose a material thick enough to work as a structure but also manageable enough to cut with an exacto knife and scissors. I chose butter board which turned out to work very well except for the small size I was working with, so when I got the axis in place and started testing, some of the pieces started to break and I had to reinforce them. Another problem that I found with the material was that I needed to enclose the components inside it, so that added weight that I didn’t really considered before. I had to reinforce a lot of parts.






Reply