Paper Cat Automata
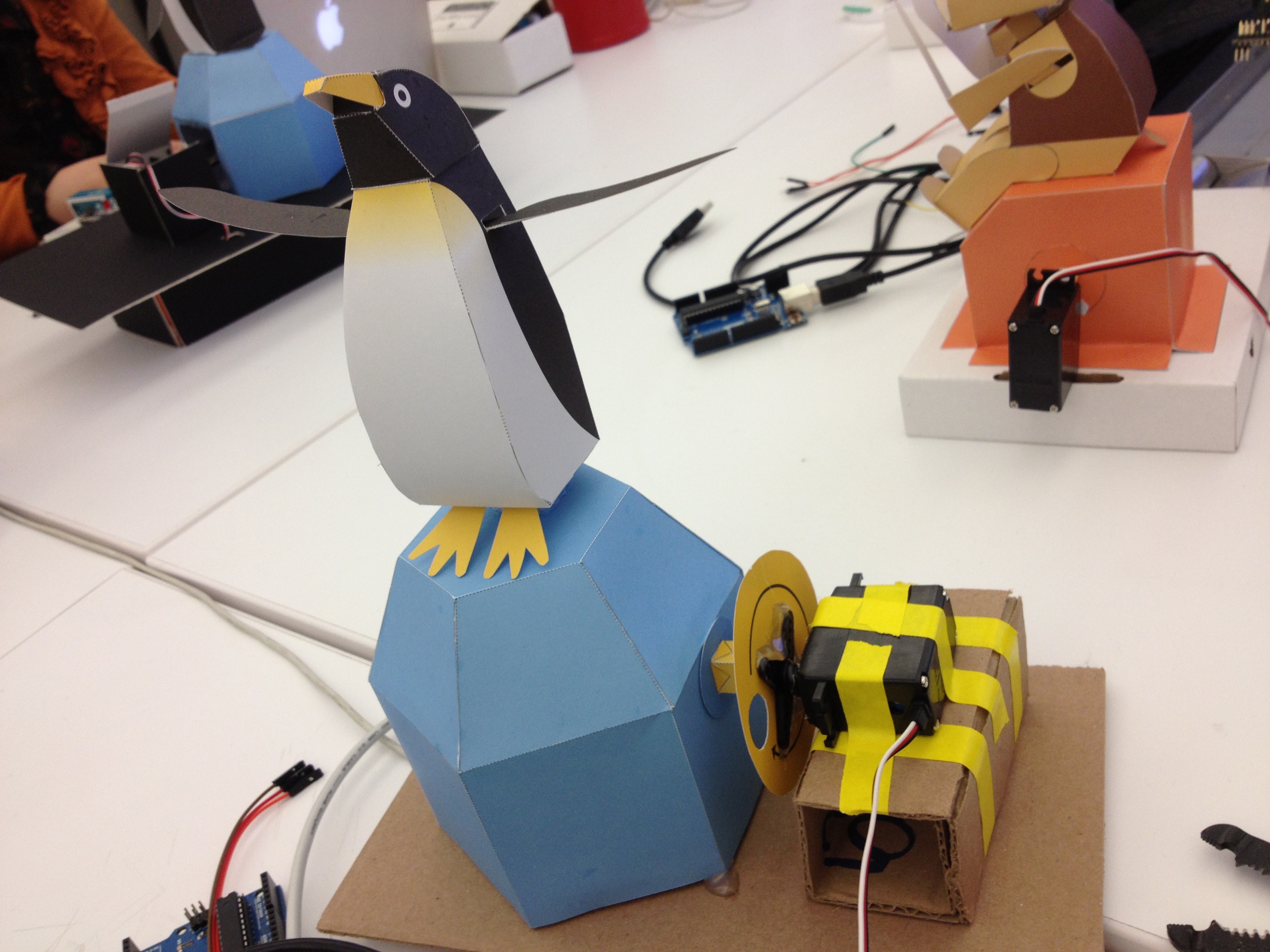
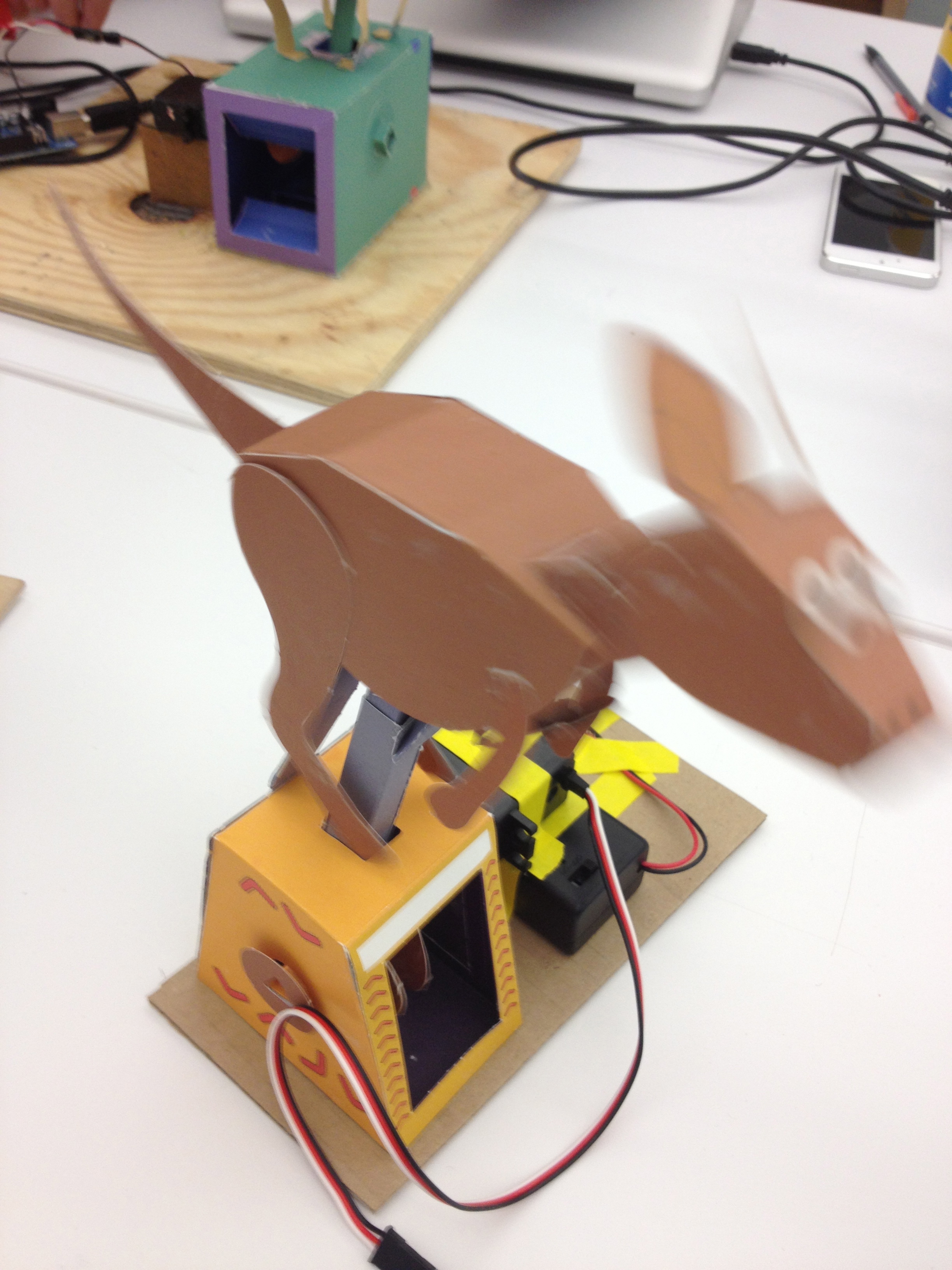
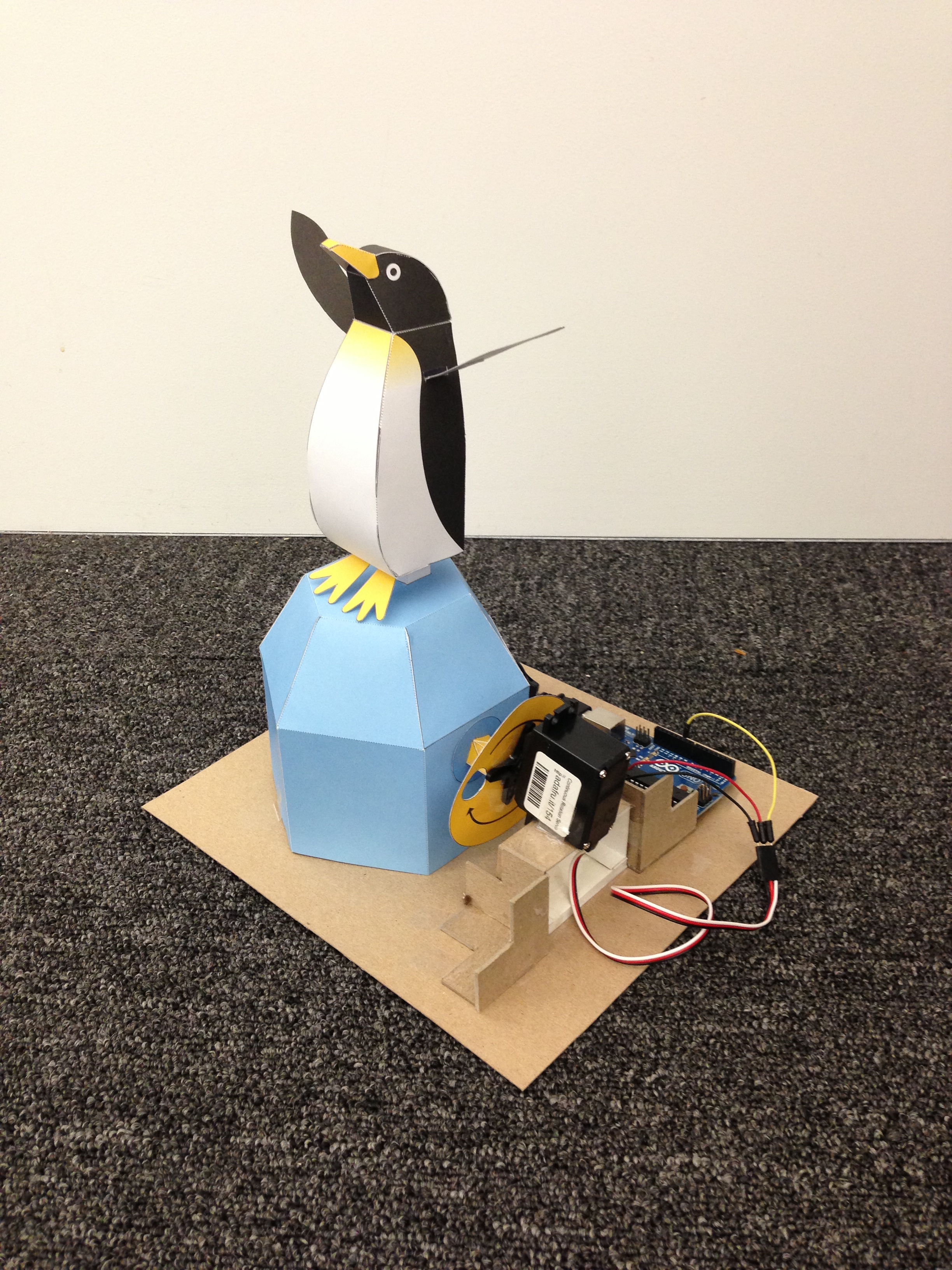
Paper Cat Automata is being controlled by a continuous servo motor and is using a serial communication to control the pace of the movement.
Paper Cat Automata is being controlled by a continuous servo motor and is using a serial communication to control the pace of the movement.
What is your academic and professional background?
University of Toronto jointly with Sheridan College 2008 – 2011
Hon. B.A. Art & Art History Specialist, CCIT Major (Communication Cultures Information Technology)
Pior coming to Parsons, I have been working on an online store on Etsy, plumule.etsy.com.
What motivated you to take this class?
I only have pcom experience through Bootcamp, and CCLab. I would like to take this course as an opportunity to learn this technical skills to be implemented with my continuous practice in Art & Design.
What is your favorite childhood toy?
I cannot recall my favorite childhood toys, except using pencils and coloring tools to draw my pet and best friend Gigi the pomeranian.
What is your favorite thing to play with these days?
My favorite thing to play with these days are lego, especially Toy Story collection. I am still missing a few sets, but one day I would like to display my favorite toy collections in my future home. I also collect Stitch dolls and toys (from Lilo and Stitch).

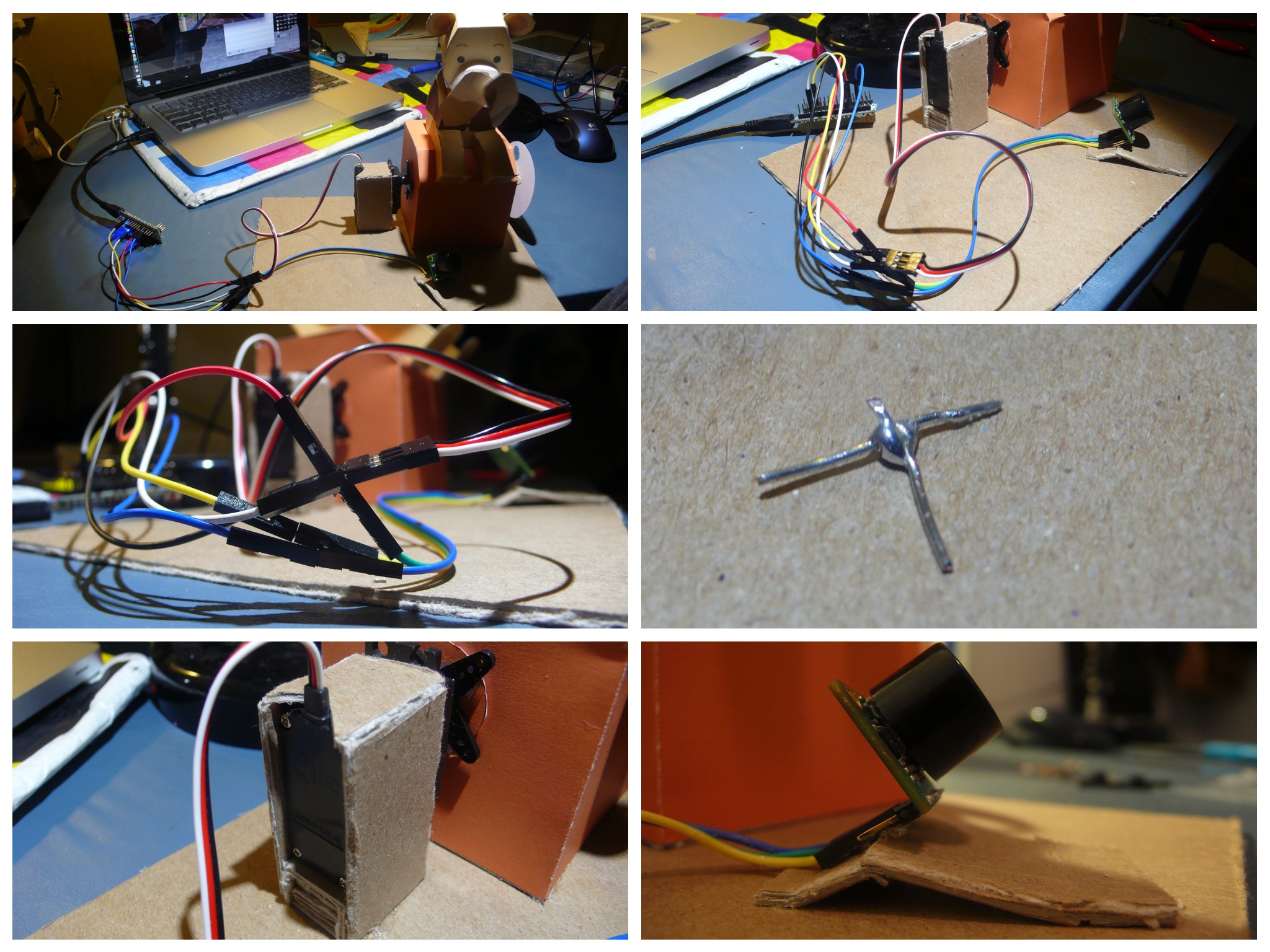
Paper Robot Automata is being controlled by a continuous servo motor and a ultrasonic range finder.
If the user comes close to the robot, the movement of the robot goes faster.
If the user moves far from the robot, the movement of the robot goes slower and stops at a certain distance.
What is your academic and professional background?
Journalism. I’m good at making music video 😀
What motivated you to take this class?
Physical computing has been my major crush since I came to DT. I took Soft Circuits last semester. This semester I’m taking Physical Computing 1, Wireless Toys and Sensemakers, all to satisfy my physical computing cravings. I was really excited when I knew we were going to do mechanical toys. I’ve been trying to make kinetic sculptures with my limited physical computing skill since the beginning of last semester, mainly around trying to alter a praxinoscope and making huge paper gears to navigate printed out photographs. I used to have a problem about controlling a motor properly. This course has helped me quite a lot. And all the sensors seem fun to me. About the bluetoothed iPhone thing I still couldn’t imagine what it feels like. I’m looking forward to explore. To me what’s fascinating about physical computing is the lifelike mojo it creates, just like GIF!!
What is your favorite childhood toy?
A stuffed bear with a button on its belly. He says “I love you” when the button is pressed.
What is your favorite thing to play with these days?
A pulse sensor. A praxinoscope. Self-made artsy stuff like this. Reddit.
It seems you actually know a good deal related to this
subject and it demonstrates via this particular posting, given the
name Hunter Douglas Blinds “Making Toys | Art, Play Experience, and Physical Computing”.
Thanks a lot ,Melody
/*
*Test post~
*Bio~
*I study product design at Parsons and I’m enthusiastic about building electronics, particularly exploring new ways of human-product interaction. So being a part of this wireless toys class and meeting talented people has been a great pleasure for me so far. Can’t wait to experiment with physical computing further and have fun making powered toys!
*RC cars were probably my favorite toys in my childhood. Indeed, I loved playing with animals and insects more than with artificial objects. And now that I’m turning into a designer, I try to bring the sense of “life” into design – making things function according to human intuition, and communicate with people as if they’re alive.
*/



Reply